|
So far, our architecture can do simple programs with conditional
jumps, which corresponds to loops in high-level languages. But,
high-level languages can do more interesting things. One such
feature is subprograms, i.e. procedures and functions.
We might for instance have a subprogram like this (in C):
h()
{
...
return;
}
and then two or more different callers like this:
f()
{
h();
}
...
g()
{
h();
}
While we can implement the call to the subprogram using
a JAL instruction, the problem is with the return address. The
subprogram cannot simply execute a JAL instruction at the end, since
it does not know whether to jump to a place inside the function
f or a place inside the function g.
Early versions of implementations of the Fortran programming
language solved the problem by storing the return address in the
memory cell immediately preceding the subprogram itself, and using
an instruction JIN (jump indirect) to return to the caller. The JIN
instruction is similar to the JAL instruction in that it jumps
unconditionally. But whereas the argument of the JAL instruction is
the address to jump to, the argument of the JIN instruction is the
address of a memory cell containing the address to jump to.
With such an instruction, we can implement the subprogram above
like this:
h-1: 0
h: ...
j in h-1
Here, we have two addresses, symbolically indicated as h-1
and h respectively. The address h-1 is
simply h minus one, so both are known at compile time.
The address h-1 is used to store the return address,
whereas the address h is the entry point of the
subprogram. Notice that when the subprogram has finished its
computation, it jumps indirectly to the address stored in the cell
whose address is h-1. We can now implement our callers
like this:
f: ...
ldimm fhret
copy
st h-1
...
jal h
fhret: ...
...
f: ...
ldimm ghret
copy
st h-1
...
jal h
ghret: ...
Here, we have introduced in each caller, an address to return to
after the subprogram has finished (fhret and ghret). As you can see,
we use this address as argument to an LDIMM instruction. We then
store the address in the cell reserved for the return address in the
callee (the subprogram). Finally, we jump unconditionally (JAL
instruction) to the entry point of the subprogram.
We know have a rudimentary subprogram call protocol,
i.e., a set of rules that determines exactly the responsibilities of
a caller and a callee in order for subprograms to work.
Our call protocol depends on the existance of a JIN instruction,
which we don't have. This instruction can, however, be implemented
without further modifications to the existing architecture. The plan
for its implementation is as follows: First use MOPs 5, 3, and 9 to
address main memory and store the argument of the instruction in the
address register. Also increment PC. Then, in the next cycle, use
the contents of the address register to address memory (MOPS 10 and
3) to obtain the address to jump to and store it in the address
register (MOP 9 again). Then in the final cycle, store the contents
of the address register into PC (MOPs 10 and 6). Here is the
complete micro program:
......: 00101010100000000000 (JIN)
......: 00100000110000000000 (JIN)
......: 10000100010000000000 (JIN)
We have omitted the exact addresses in the micro memory as well
as the instruction code, since these are determined as usual by the
first ones available.
There is a major inconvenience with this solution to subroutine
calling, however. The caller must use the registers in order to load
and store the return address. We can do better than that if we have
a special instruction for subprogram calling. Most architectures
contain such an instruction that is usually called JSR (jump to
subroutine). The JSR instruction takes care of both storing the
return address, which it takes from the current value of PC, and
jumping unconditionally to the subprogram. With such an instruction,
our subprograms could be implemented like this:
h-1: 0
h: ...
jin h-1
...
f: ...
jsr h-1
...
...
g: ...
jsr h-1
...
The JSR instruction is not possible to implement with our current
architecture. The reason is simple: we need to store the current
value of PC in a cell in main memory. However, there is no data path
from PC to the data bus. In order to implement JSR, we need to add
such a data path.
Here is a complete description of what JSR must do:
To implement JSR, we add a new register, that we call the data
register (for symmetry with address register). Here is our modified
architecture:
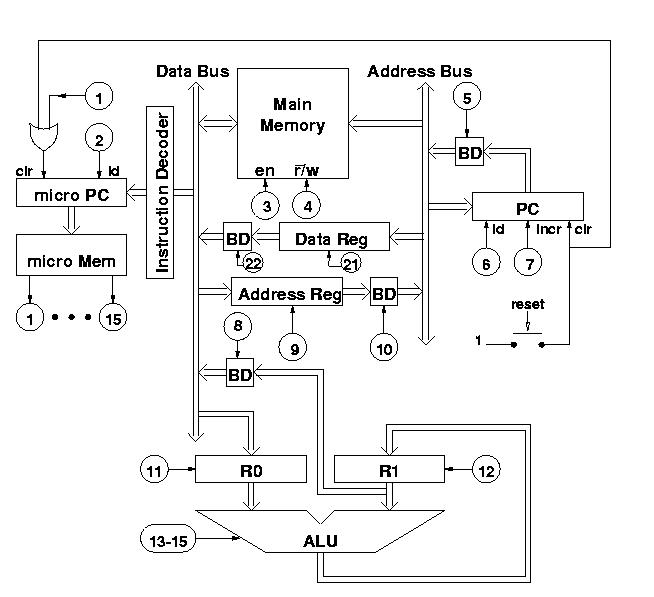
Notice the new MOPs number 21 and 22 to load the data register
and to communicate its contents to the data bus respecitively. To
implement JSR, we use the following plan:
-
In the first cycle, load the argument of the jsr instruction
into the address register and increment PC
-
Next store the contents of PC in the data register
-
In cycles 3-6, write the contents of the address register into
memory using the address contained in the data register
-
Then, store the contents of the data register into PC
-
Finally increment PC to obtain one plus the argument
Here is the microprogram:
......: 0010101010000000000000 (JSR)
......: 0000100000000000000010 (JSR)
......: 0000000001000000000001 (JSR)
......: 0001000001000000000001 (JSR)
......: 0011000001000000000001 (JSR)
......: 0001000001000000000001 (JSR)
......: 0000010001000000000000 (JSR)
......: 1000001000000000000000 (JSR)
Recursion
The call/return protocol presented above does not allow for
recursion, i.e. subroutines that call themselves directly or
indirectly. The reason is simple: the second time a subroutine is
called, the stored return address will be overwritten and lost
forever. For a language such as Fortran, this is not a problem,
since recursion is not allowed by the languages. But most modern
languages allow recursion. So how can we improve our architecture to
allow for recursion? The answer is that we need a stack.
A stack is a sequence of cells in memory one end of which is
pointed to by a register called the stack pointer. That end
is called the top of the stack. Four different but
equivalent conventions are used according to whether the top of the
stack is the highest or the lowest address in memory, and according
to whether the stack pointer points to the top element of the stack
or to the first free position beyond the top element. Here, we use
the convention used by most Unix systems: the stack top is the
lowest address and the stack pointer points to the top element.
Here are the modifications to our architecture in order to
support a stack:
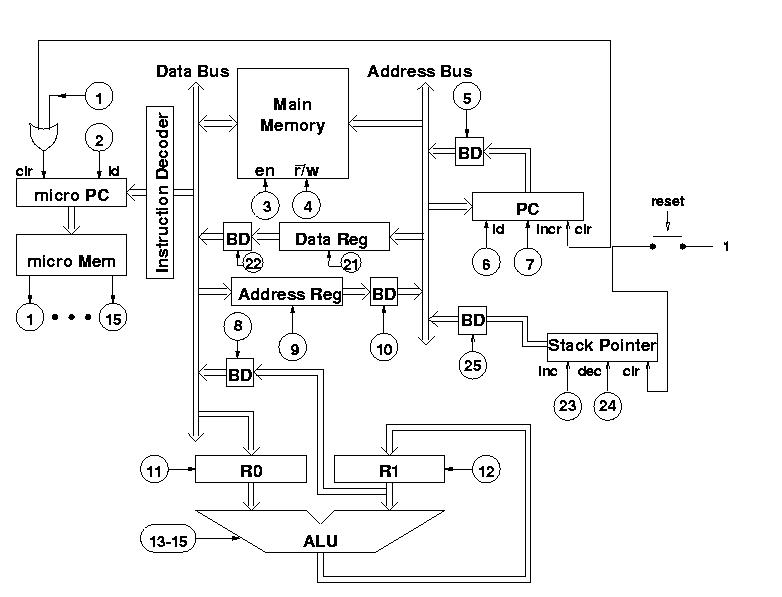
The stack pointer can be cleared, incremented and decremented.
Clearing the stack pointer at reset time is justified, since one can
view the memory as circular. Address 0 in memory can be seen as
lying just beyond the end of the memory. Three new MOPs are needed,
23 for incrementation, 24 for decrementation, and 25 for
communicating the contents of the stack pointer to the address bus.
With this new architecture we can redefine the JSR instruction
and add a new instruction RET (for return). Here are our subprograms
with these new instructions:
h: ...
ret
...
f: ...
jsr h
...
...
g: ...
jsr h
...
Here is the new description of the modified JSR instruction:
And here is the description of the RET instruction:
Here is the plan for implementing the JSR instruction:
-
in the first cycle, load the argument of the instruction into
the address register and increment PC
-
next load the contents of PC into the data register. At the
same time, decrement the stack pointer
-
in cycles 3-6 emit a write cycle to memory using the data
register as data and the stack pointer as address
-
finally, load the contents of the address register into PC
Here is the micro program for JSR:
......: 0010101010000000000000000 (JSR)
......: 0000100000000000000010010 (JSR)
......: 0000000000000000000001001 (JSR)
......: 0001000000000000000001001 (JSR)
......: 0011000000000000000001001 (JSR)
......: 0001000000000000000001001 (JSR)
......: 1000010001000000000000000 (JSR)
Here is the plan for implementing the RET instruction:
-
in the first cycle, use the stack pointer to address memory,
and store the top of the stack in the address register
-
in the second and last cycle, load the value of the address
register into PC and increment the stack pointer
Here is the micro program for RET:
......: 0010000010000000000000001 (RET)
......: 1000010001000000000000100 (RET)
|


