Feedback is a fascinating engineering principle.
It can turn a rather simple device or process into something substantially
more complex. We've seen the effects of feedback intentionally integrated
into circuit designs with some rather astounding effects:
Comparator + negative feedback -----------> controllable-gain
amplifier Comparator + positive feedback -----------> comparator with hysteresis
Combinational logic + positive feedback --> multivibrator
In the field of process instrumentation, feedback is used to transform a
simple measurement system into something capable of control:
Feedback, both positive and negative, has the tendency to add whole new
dynamics to the operation of a device or system. Sometimes, these new
dynamics find useful application, while other times they are merely
interesting. With look-up tables programmed into memory devices, feedback
from the data outputs back to the address inputs creates a whole new type of
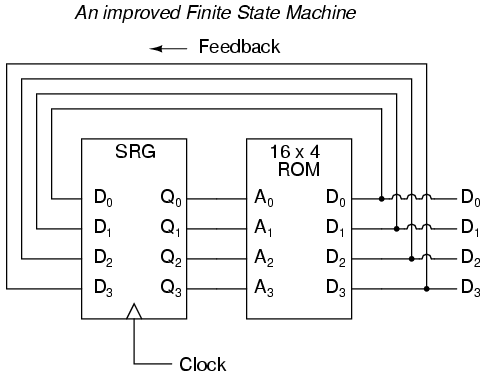
device: the Finite State Machine, or FSM:

The above circuit illustrates the basic idea: the data stored at each
address becomes the next storage location that the ROM gets addressed to.
The result is a specific sequence of binary numbers (following the sequence
programmed into the ROM) at the output, over time. To avoid signal timing
problems, though, we need to connect the data outputs back to the address
inputs through a 4-bit D-type flip-flop, so that the sequence takes place
step by step to the beat of a controlled clock pulse:
An analogy for the workings of such a device might be an array of
post-office boxes, each one with an identifying number on the door (the
address), and each one containing a piece of paper with the address of
another P.O. box written on it (the data). A person, opening the first P.O.
box, would find in it the address of the next P.O. box to open. By storing a
particular pattern of addresses in the P.O. boxes, we can dictate the
sequence in which each box gets opened, and therefore the sequence of which
paper gets read.
Having 16 addressable memory locations in the ROM, this Finite State
Machine would have 16 different stable "states" in which it could latch. In
each of those states, the identity of the next state would be programmed in
to the ROM, awaiting the signal of the next clock pulse to be fed back to
the ROM as an address. One useful application of such an FSM would be to
generate an arbitrary count sequence, such as Gray Code:
Address -----> Data |
Gray Code count sequence: |
0000 -------> 0001 |
0 0000 |
0001 -------> 0011 |
1 0001 |
0010 -------> 0110 |
2 0011 |
0011 -------> 0010 |
3 0010 |
0100 -------> 1100 |
4 0110 |
0101 -------> 0100 |
5 0111 |
0110 -------> 0111 |
6 0101 |
0111 -------> 0101 |
7 0100 |
1000 -------> 0000 |
8 1100 |
1001 -------> 1000 |
9 1101 |
1010 -------> 1011 |
10 1111 |
1011 -------> 1001 |
11 1110 |
1100 -------> 1101 |
12 1010 |
1101 -------> 1111 |
13 1011 |
1110 -------> 1010 |
14 1001 |
1111 -------> 1110 |
15 1000 |
Try to follow the Gray Code count sequence as the FSM would do it:
starting at 0000, follow the data stored at that address (0001) to the next
address, and so on (0011), and so on (0010), and so on (0110), etc. The
result, for the program table shown, is that the sequence of addressing
jumps around from address to address in what looks like a haphazard fashion,
but when you check each address that is accessed, you will find that it
follows the correct order for 4-bit Gray code. When the FSM arrives at its
last programmed state (address 1000), the data stored there is 0000, which
starts the whole sequence over again at address 0000 in step with the next
clock pulse.
We could expand on the capabilities of the above circuit by using a ROM
with more address lines, and adding more programming data:
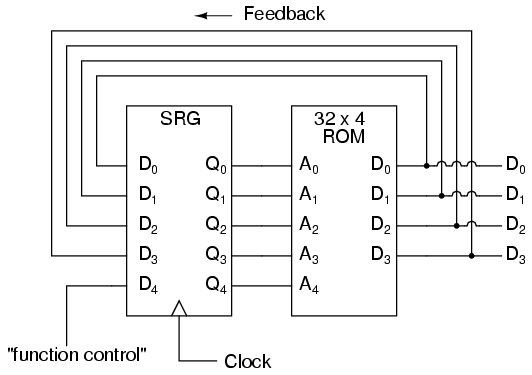
Now, just like the look-up table adder circuit that we turned into an
Arithmetic Logic Unit (+, -, x, / functions) by utilizing more address lines
as "function control" inputs, this FSM counter can be used to generate more
than one count sequence, a different sequence programmed for the four
feedback bits (A0 through A3) for each of the two function control line
input combinations (A4 = 0 or 1).
|
Address -----> Data |
Address -----> Data |
|
00000 -------> 0001
|
10000 -------> 0001 |
|
00001 -------> 0010 |
10001 -------> 0011 |
|
00010 -------> 0011 |
10010 -------> 0110 |
|
00011 -------> 0100 |
10011 -------> 0010 |
|
00100 -------> 0101 |
10100 -------> 1100 |
|
00101 -------> 0110 |
10101 -------> 0100 |
|
00110 -------> 0111 |
10110 -------> 0111 |
|
00111 -------> 1000 |
10111 -------> 0101 |
|
01000 -------> 1001 |
11000 -------> 0000 |
|
01001 -------> 1010 |
11001 -------> 1000 |
|
01010 -------> 1011 |
11010 -------> 1011 |
|
01011 -------> 1100 |
11011 -------> 1001 |
|
01100 -------> 1101 |
11100 -------> 1101 |
|
01101 -------> 1110 |
11101 -------> 1111 |
|
01110 -------> 1111 |
11110 -------> 1010 |
|
01111 -------> 0000 |
11111 -------> 1110 |
If A4 is 0, the FSM counts in binary; if A4 is 1, the FSM counts in Gray
Code. In either case, the counting sequence is arbitrary: determined by the
whim of the programmer. For that matter, the counting sequence doesn't even
have to have 16 steps, as the programmer may decide to have the sequence
recycle to 0000 at any one of the steps at all. It is a completely flexible
counting device, the behavior strictly determined by the software
(programming) in the ROM.
We can expand on the capabilities of the FSM even more by utilizing a ROM
chip with additional address input and data output lines. Take the following
circuit, for example:

Here, the D0 through D3 data outputs are used exclusively for feedback to
the A0 through A3 address lines. Date output lines D4 through D7 can be
programmed to output something other than the FSM's "state" value. Being
that four data output bits are being fed back to four address bits, this is
still a 16-state device. However, having the output data come from other
data output lines gives the programmer more freedom to configure functions
than before. In other words, this device can do far more than just count!
The programmed output of this FSM is dependent not only upon the state of
the feedback address lines (A0 through A3), but also the states of the input
lines (A4 through A7). The D-type flip/flop's clock signal input does not
have to come from a pulse generator, either. To make things more
interesting, the flip/flop could be wired up to clock on some external
event, so that the FSM goes to the next state only when an input signal
tells it to.
Now we have a device that better fulfills the meaning of the word
"programmable." The data written to the ROM is a program in the truest
sense: the outputs follow a pre-established order based on the inputs to the
device and which "step" the device is on in its sequence. This is very close
to the operating design of the Turing Machine, a theoretical
computing device invented by Alan Turing, mathematically proven to be able
to solve any known arithmetic problem, given enough memory capacity. |
